切换界面风格
各轴参数配置
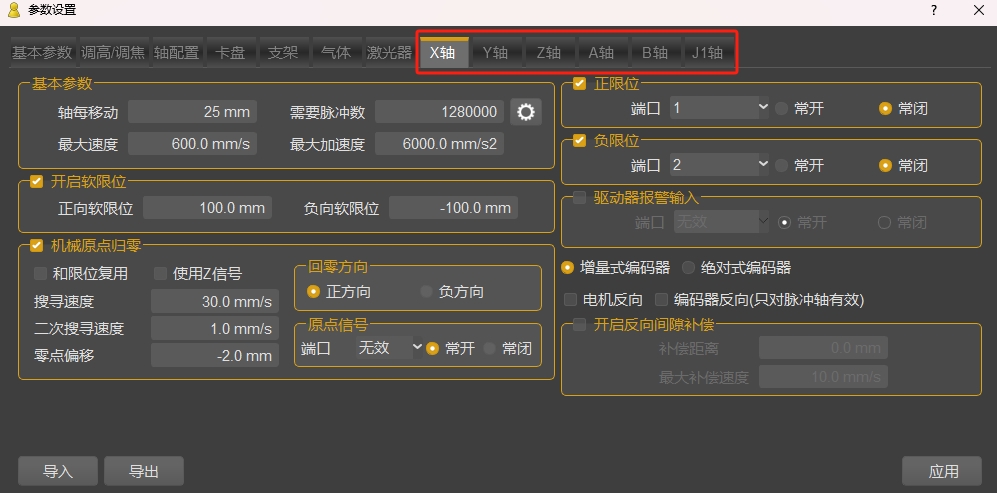
基本参数
参数名称 释义 轴每移动 轴的位移距离(直线轴为毫米,旋转轴为度)。 需要脉冲数 对应上方轴移动的距离,需要多少个脉冲。 最大速度 轴的关节最大速度,该参数也是空移时的速度。 最大加速度 轴的关节最大加速度,该参数也是空移时的加速度。 开启软限位
参数名称 释义 正向软限位 轴移动的最大正方向限位。 负向软限位 轴移动的最大负方向限位。 机械原点归零
参数名称 释义 和限位复用 该选项主要用于设备只有正负限位,没有原点信号时启用,把限位当作回原信号使用。 使用Z信号 若编码器上有Z信号功能,可通过该信号做为回原点信号(若该轴为直线轴,则需增加一个感应器,不可直接使用Z信号寻原点)。 搜寻速度 搜寻原点感应器信号的速度。 二次搜寻速度 搜寻到感应器后进行二次搜寻的速度。 零点偏移 原点感应器搜寻结束后,偏移相对距离再次重置零点。 回零方向 轴回原的方向。 原点信号 寻原点的感应器端口号(勾选“和限位复用”时该参数将不显示)。 正限位:轴运动正方向限位信号和常态电平,配置完毕后,可以人为触发,观察报警信息是否一致。
负限位:轴运动负方向限位信号和常态电平,配置完毕后,可以人为触发,观察报警信息是否一致。
驱动器报警输入:驱动器报警输入信号。
增量式编码器:电机编码器不带电池,需配置原点信号,每次断电后需重新回原。
绝对式编码器:电机编码器带电池,在确认好原点后,断电后将不需要再回原。
电机反向:轴运动正负方向,需按系统规定的运动方向,若相反,则断开使能,勾选该参数后应用,重新上使能。
编码器反向:编码器脉冲反向(只对脉冲轴有效)。
开启反向间隙补偿
参数名称 释义 补偿距离 根据实际反向间隙的距离填写该参数 最大补偿速度 反向运动时关节最大补偿速度。