切换界面风格
Tube版本:1.4.20.26
App版本:1.3.114
控制卡型号:RT255x / RT245x / RT245x-P / MT244x / PT242x / DT243x / AMC251x / AMC241x
管材切割控制卡接线手册
[TOC]
1. 产品介绍
小步数控系列控制板卡及其配件表如下图所示。
个别产品由于版本升级问题,实物和图片可能有所偏差,具体问题可联系厂家销售代表咨询。

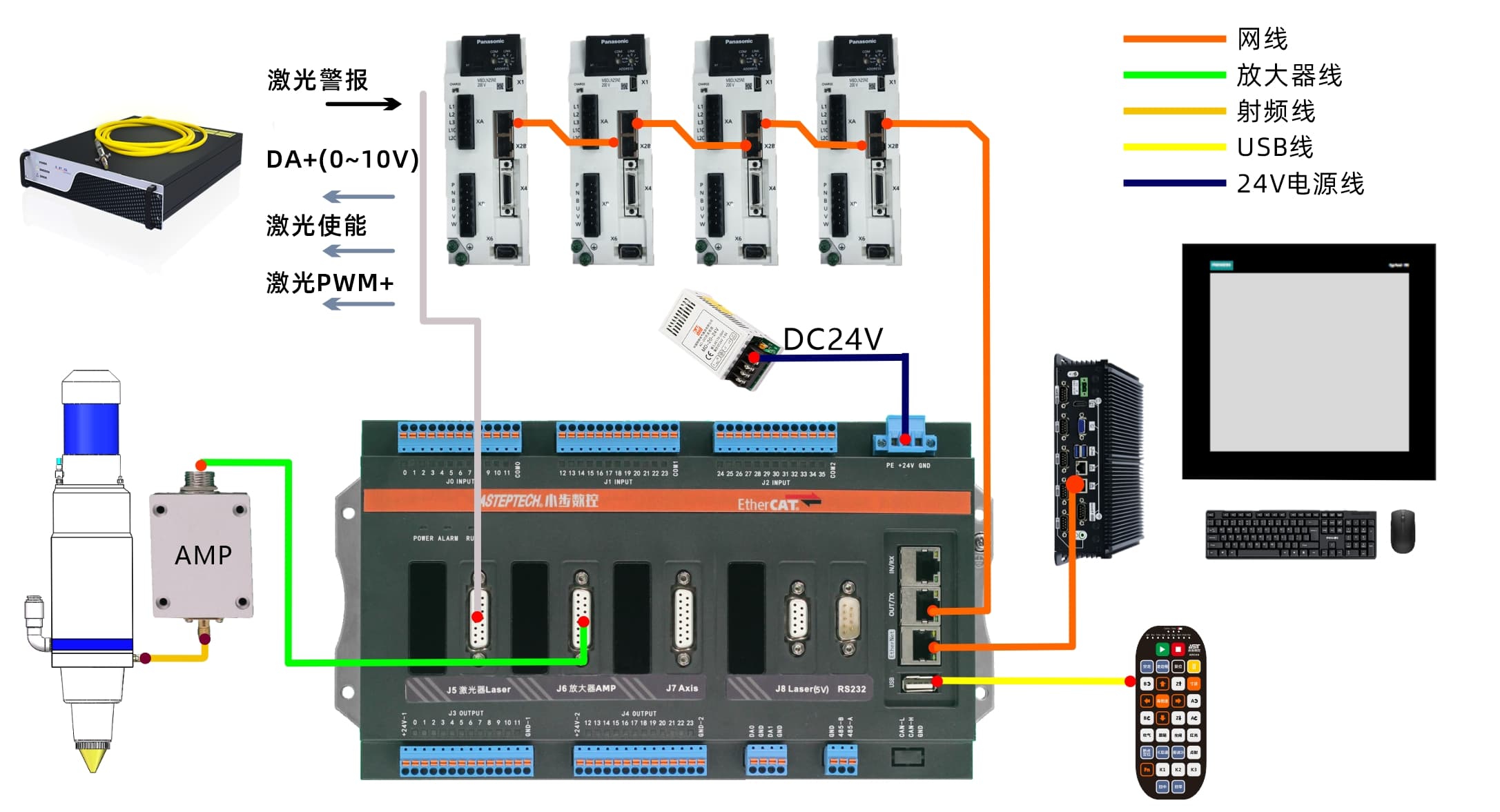
2. 系统接线示意图
3. AMC24xx串口(RS232)
串口(DB9)引脚定义:
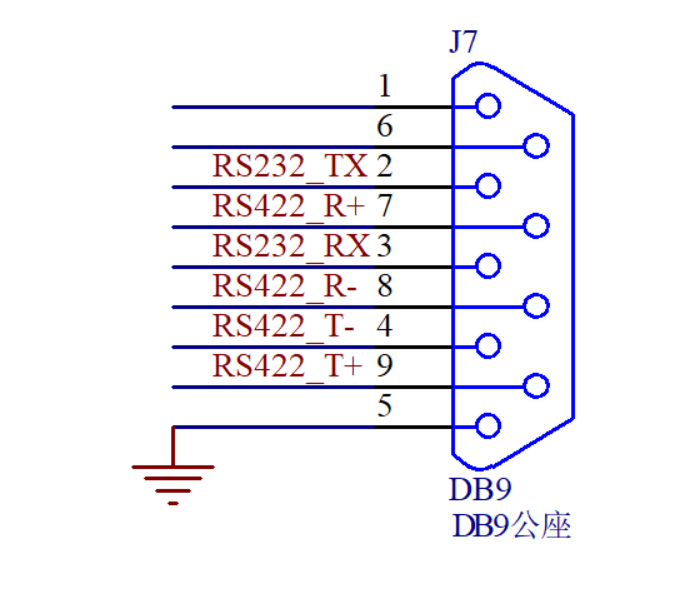
| 引脚 | 定义 | 功能 |
|---|---|---|
| 1 | NC | 空脚 |
| 2 | RS232_TX | RS232数据发送 |
| 3 | RS232_RX | RS232数据接收 |
| 4 | RS422_T- | RS422发送差分信号- |
| 5 | GND | 电源地 |
| 6 | NC | 空脚 |
| 7 | RS422_R+ | RS422接收差分信号+ |
| 8 | RS422_R- | RS422接收差分信号- |
| 9 | RS422_T+ | RS422发送差分信号+ |
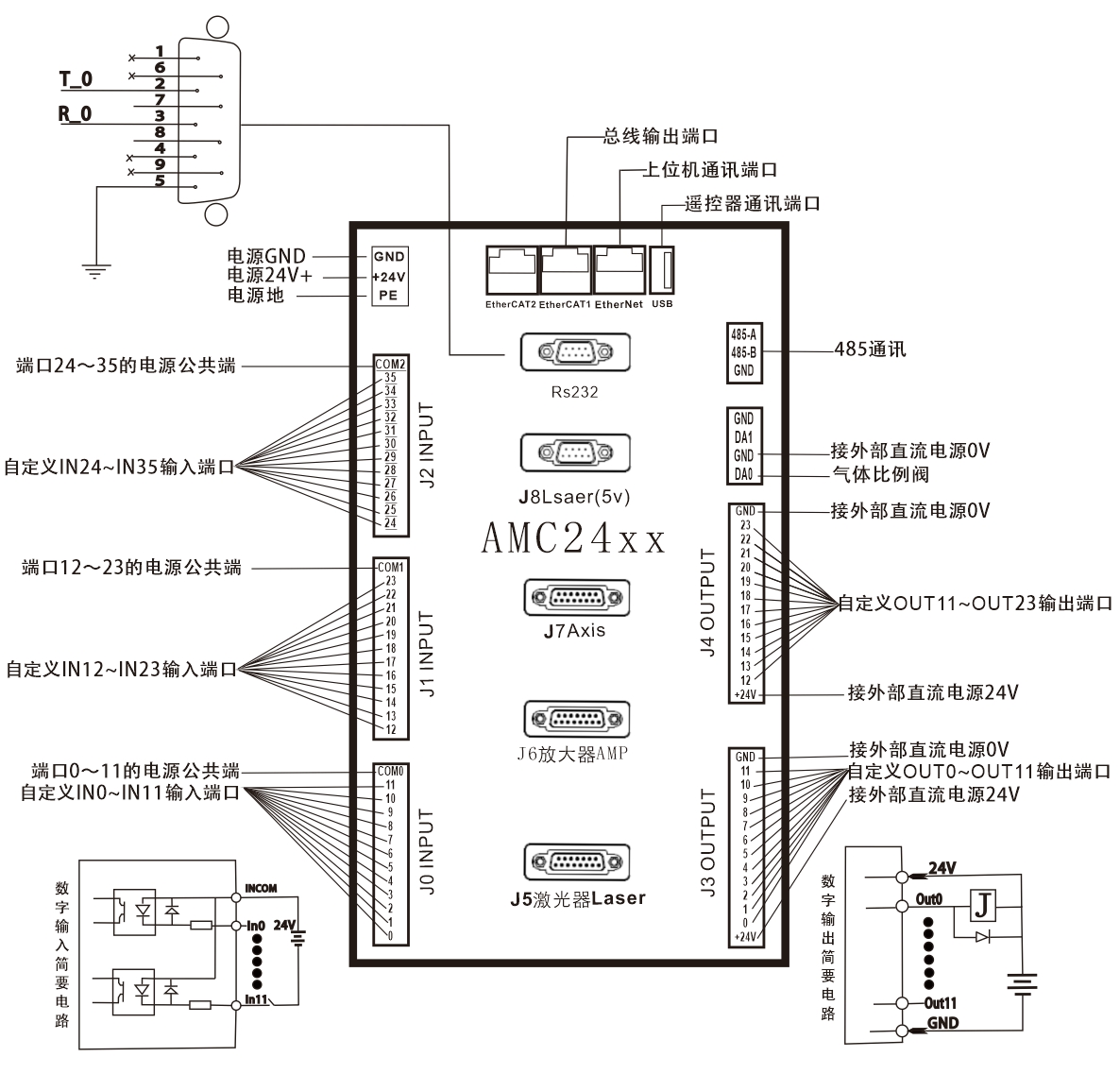
4. AMC24xx输入输出信号接口
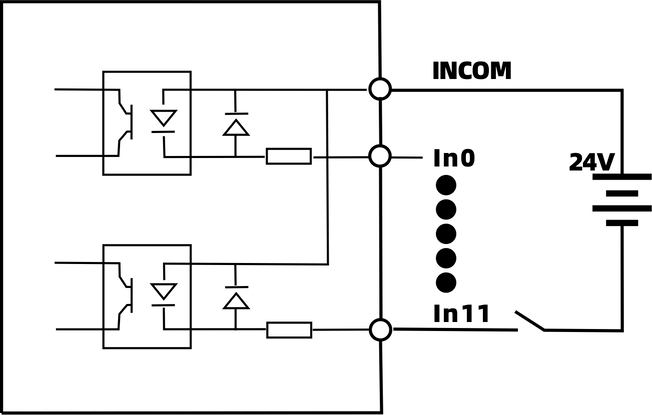
4.1 控制卡输入端口定义(J0,J1,J2)
数字输入简要内部电路:
| 线号 | 定义 | 功能 |
|---|---|---|
| 0-11 | IN0 - IN11 | 自定义普通输入 |
| COM0 | 电源公共端 | 端口00~11的电源公共端 注4.12 |
| 12-23 | IN12 - IN23 | 自定义普通输入 |
| COM1 | 电源公共端 | 端口12~23的电源公共端注4.12 |
| 24-35 | IN24 - IN35 | 自定义普通输入 |
| COM2 | 电源公共端 | 端口24~35的电源公共端注4.12 |
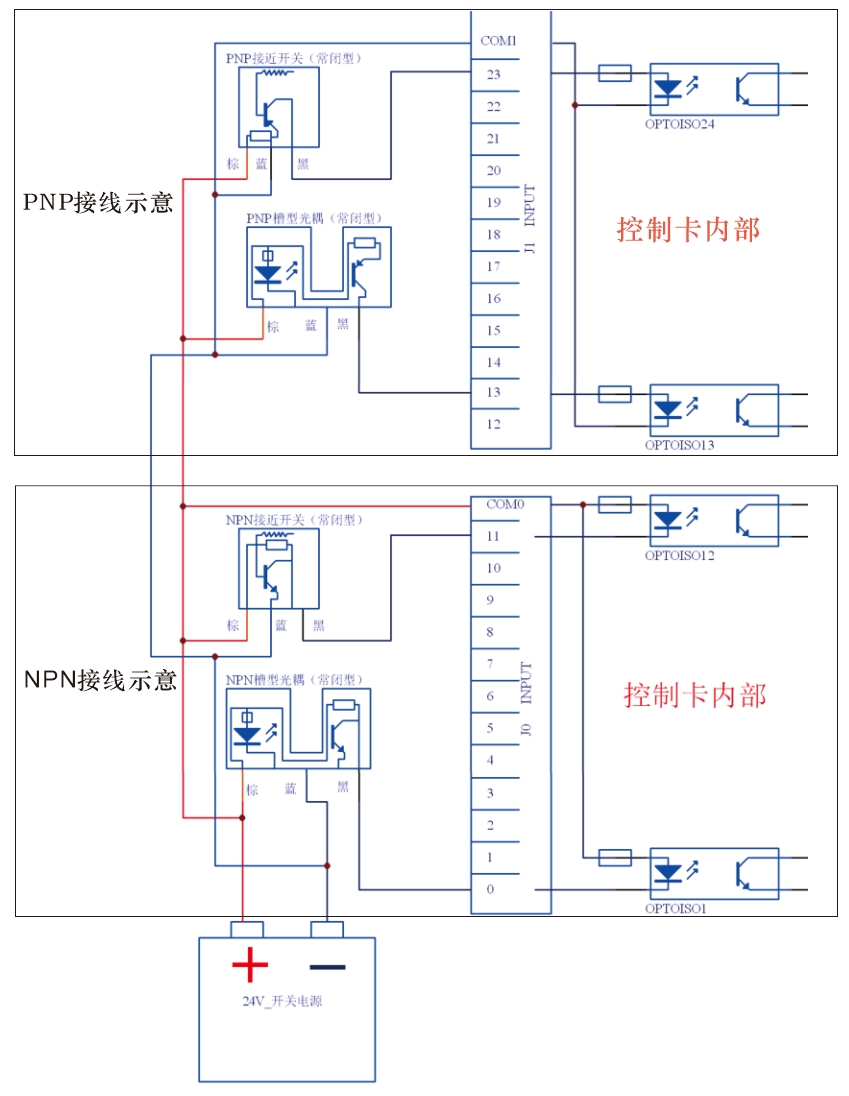
注4.11:输入开关常见选型用:光电式,霍尔开关,接近开关选用NPN(常闭)开关。
注4.12:每组输入端子都有独立的公共端,并且必须和输入所接的传感器类型(NPN或PNP)同一组,不要两种类型混合接在同一组。
接线示意图:
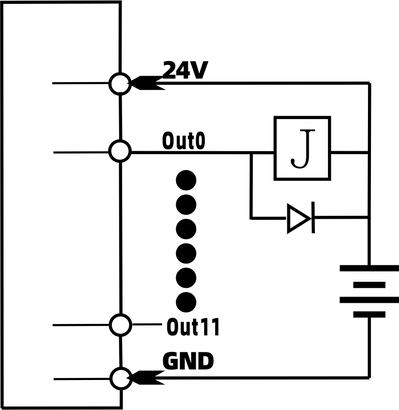
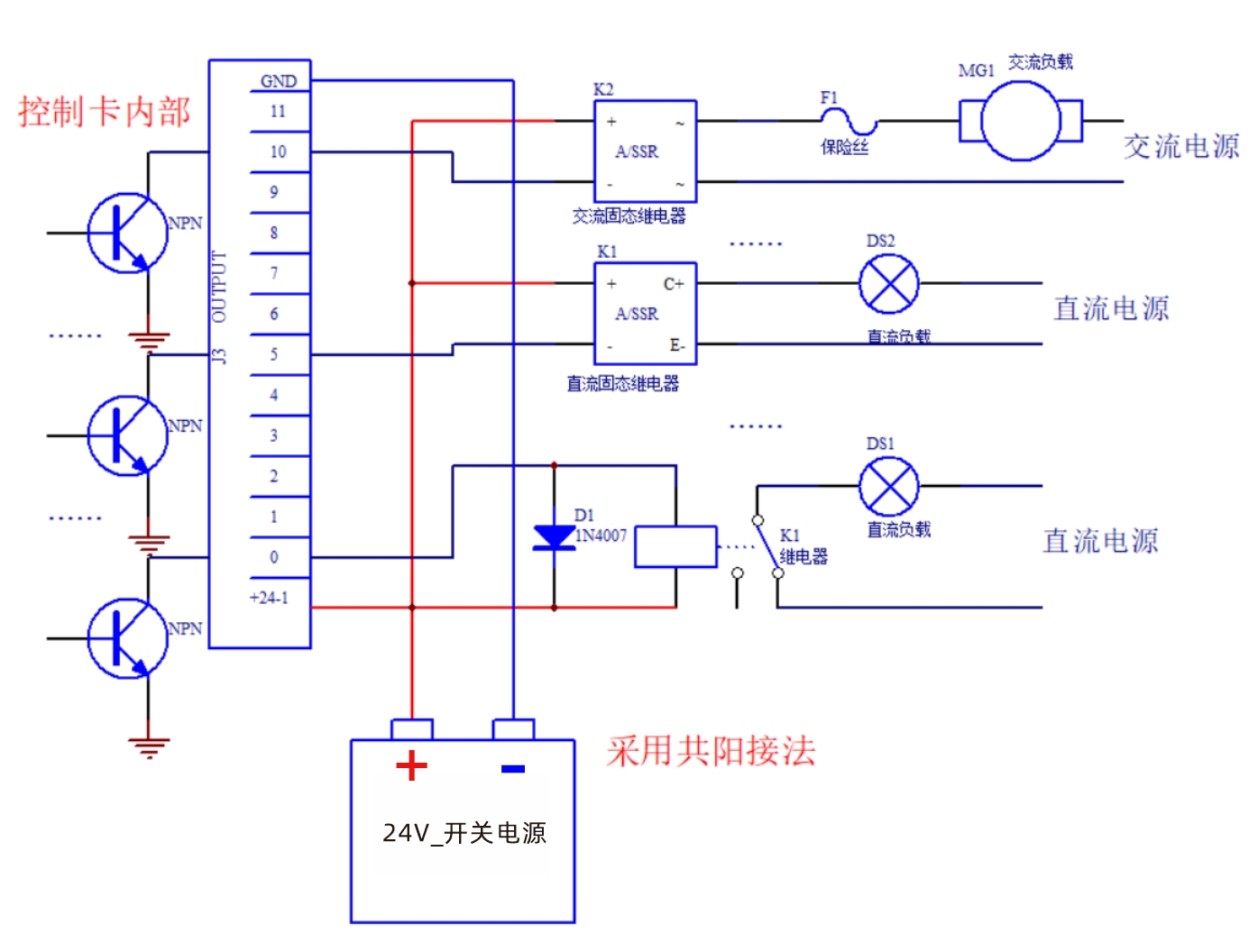
4.2 控制卡输出端口定义(J3,J4)
控制卡输出是NPN输出.
数字输出简要内部电路:
| 线号 | 定义 | 功能 |
|---|---|---|
| 24v | 电源24v | 接外部直流电源24v 注4.21 |
| 0 ~ 11 | OUT0~OUT11 | 自定义普通输出 |
| GND | 电源0V | 接外部直流电源0v 注4.21 |
| 24v | 电源24v | 接外部直流电源24v 注4.21 |
| 12 ~ 23 | OUT12~OUT23 | 自定义普通输出 |
| GND | 电源0v | 接外部直流电源0v |
注4.21:输出所接的传感器,所用的外部电源和接口上的24V/0V必须是同一个电源
接线示意图:
5. 激光器输入输出端口
激光器的输入输出是PNP输出(24V输出),这点和控制器的通用输出是不一样的,接线时需要注意一下,避免短路击穿。
激光专用输入输出端口只能用于激光器,目前适配过国内外主流的连续激光器,准连续激光器,二氧化碳激光器。请不要用于其他设备控制。
5.1 激光器24专用输入输出端口(J5)
| 线号 | 定义 | 备注 |
|---|---|---|
| 1 | 激光器使能输出(+) | |
| 2 | 红光输出(+) | |
| 3 | 备用输出(+) | |
| 4 | 备用输入(-) | |
| 5 | 输入公共端(+) | |
| 6 | 模拟量输出(+) | DA+ |
| 7 | 电源24v输出(+) | |
| 8 | 输出公共端(-) | 脉宽调制PWM-,激光器使能-,红光- |
| 9 | 清除激光报警输出(+) | |
| 10 | 激光器pwm输出(+) | 脉宽调制PWM+ |
| 11 | 冷水机报警输入(-) | |
| 12 | 激光器报警输入(-) | |
| 13 | 空 | |
| 14 | 模拟量输出(-) | DA- |
| 15 | 电源24v输出(+) |
5.2 激光器5V专用输入输出端口(J8)
| 线号 | 定义 | 备注 |
|---|---|---|
| 1 | 电源0v输出(-) | 电源负(PWM信号地) |
| 2 | 激光器pwm输出(+) | PWM+ |
| 3 | 悬空 | NC |
| 4 | 模拟量输入(0-5V) | ADC_IN |
| 5 | 模拟量输出地(-) | DA- |
| 6 | 电源5v输出(+) | 电源正 |
| 7 | 模拟量输入地 | ADC_GND |
| 8 | 模拟量输入12V电源 | ADC_12V |
| 9 | 模拟量输出(+) | DA+ |
5.2.1小步控制卡与锐科QCW激光器接线定义表
| 小步DB9(公)线号 | 锐科激光器DB25(母) | 定义 |
|---|---|---|
| 1 | 9 | 信号地 |
| 2 | 17 | 激光器pwm输出(+) |
| 5 | 1 | 电源0v输出(-) |
| 6 | 15 | 电源5v输出(+) |
| 9 | 8 | 模拟量输出(+) |
6. 放大器AMP接口(J6)
搭配放大器专用高柔线缆,对插即可。
| 线号 | 定义 | 备注 |
|---|---|---|
| 1 | 放大器9V电源 | 9V |
| 2 | 放大器信号输入 | CAP_TEST_S |
| 3 | 放大器电源地 | GND_ISO |
| 4 | 外壳地(大地) | PE |
| 5 | 模拟输入(0-10V) | ADC_IN |
| 6 | 4-20mA电流模拟输入负 | IN+_4-20mA |
| 7 | 24V电源输出 | 24V |
| 8 | 24V电源地 | GND_E |
| 9 | 放大器5V电源 | 5V |
| 10 | 放大器电源地 | GND_ISO |
| 11 | 外壳地(大地) | PE |
| 12 | 模拟量输入12V电源 | 12V |
| 13 | 4-20mA电流模拟输入正 | IN-_4-20mA |
| 14 | 模拟量输入地 | ADC_GND |
| 15 | 24V电源输出 | 24V |
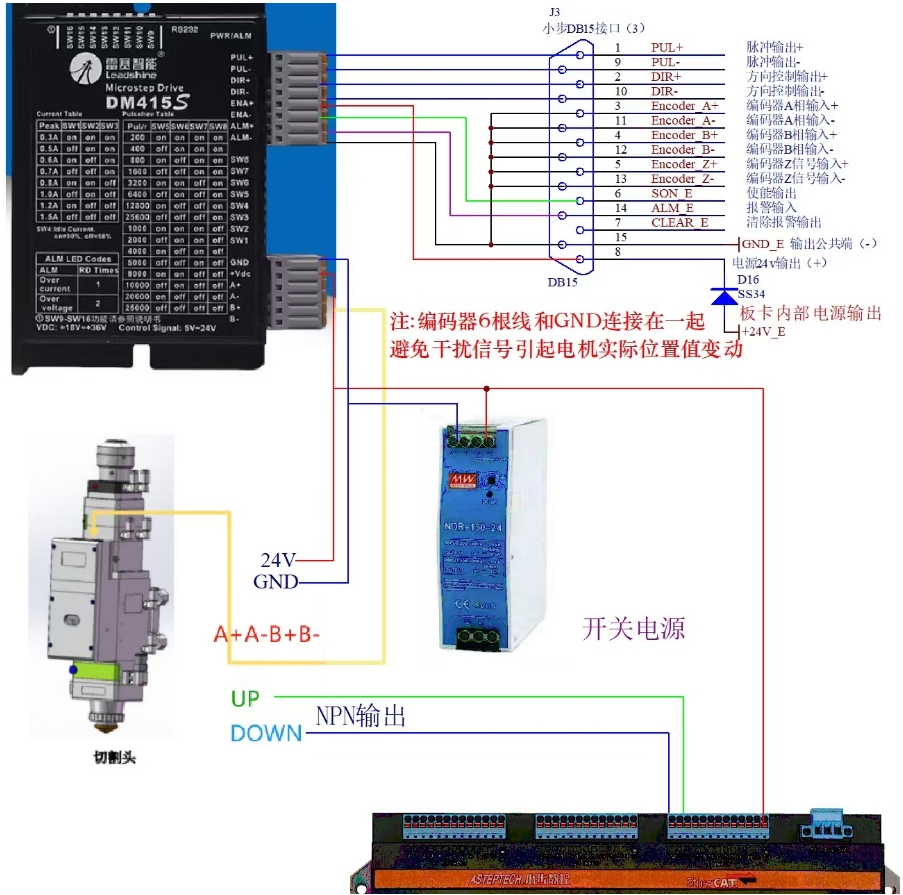
7.脉冲调焦轴专用接口(J7)
| 引脚 | 定义 | 备注 |
|---|---|---|
| 1 | PUL+ | 脉冲(PUL),差分输出信号(+)。 |
| 2 | DIR+ | 方向(DIR),差分输出信号(+)。 |
| 3 | Encoder_A+ | 编码器A相差分输入(+)。 |
| 4 | Encoder_B+ | 编码器B相差分输入(+)。 |
| 5 | Encoder_Z+ | 编码器Z信号差分输入(+)。 |
| 6 | SON | 伺服 ON,输出伺服驱动使能信号。 |
| 7 | CLEAR | 清除报警输出。 |
| 8 | +24V | 为驱动器提供DC 电源24V。 |
| 9 | PUL- | 脉冲(PUL),差分输出信号(-)。 |
| 10 | DIR- | 方向(DIR),差分输出信号(-)。 |
| 11 | Encoder_A- | 编码器A相差分输入(-)。 |
| 12 | Encoder_B- | 编码器B相差分输入(-)。 |
| 13 | Encoder_Z- | 编码器Z信号差分输入(-)。 |
| 14 | ALM | 报警,接收伺服驱动器报警信号。 |
| 15 | GND | 为驱动器提供DC 电源0V。 |
接线示意图:
8. 气体比例阀接口
| 线号 | 定义 | 备注 |
|---|---|---|
| DA0 | 模拟信号0(0-10V)输出(+) | 气体比例阀控制信号;DA0 |
| GND | 模拟信号地 | GND |
| DA1 | 模拟信号1(0-10V)输出(+) | 备用模拟信号:DA1 |
| GND | 备用模拟信号地 | GND |
接线示意图: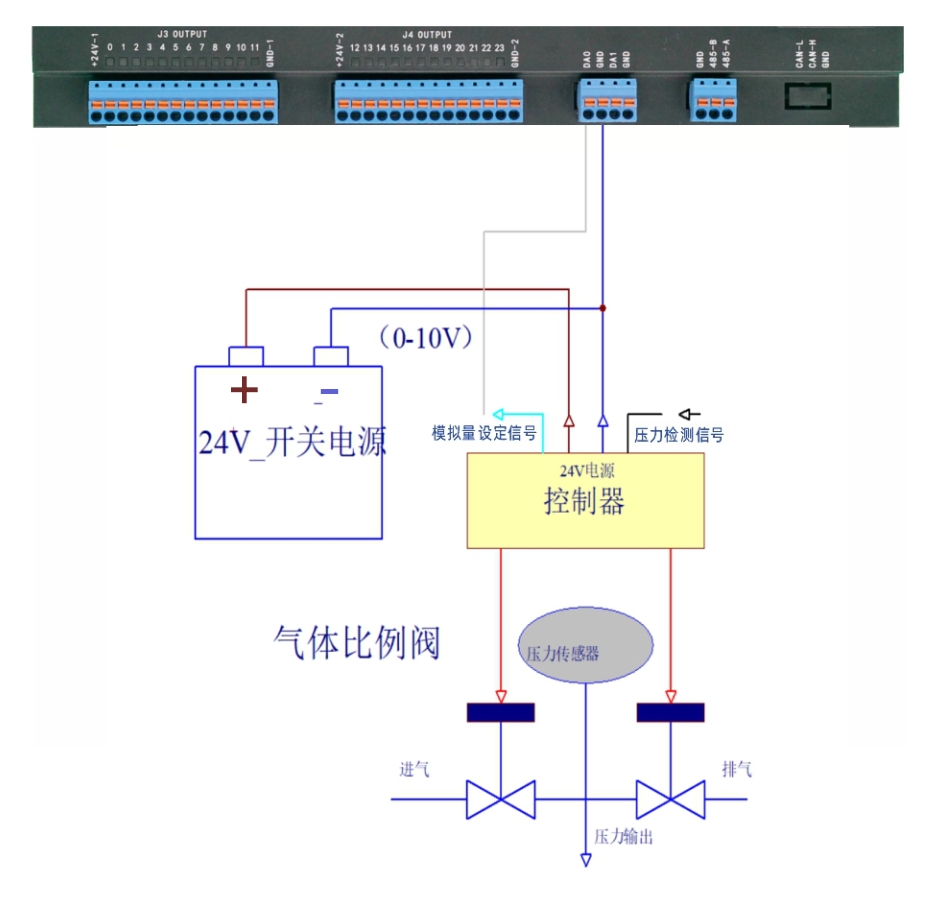
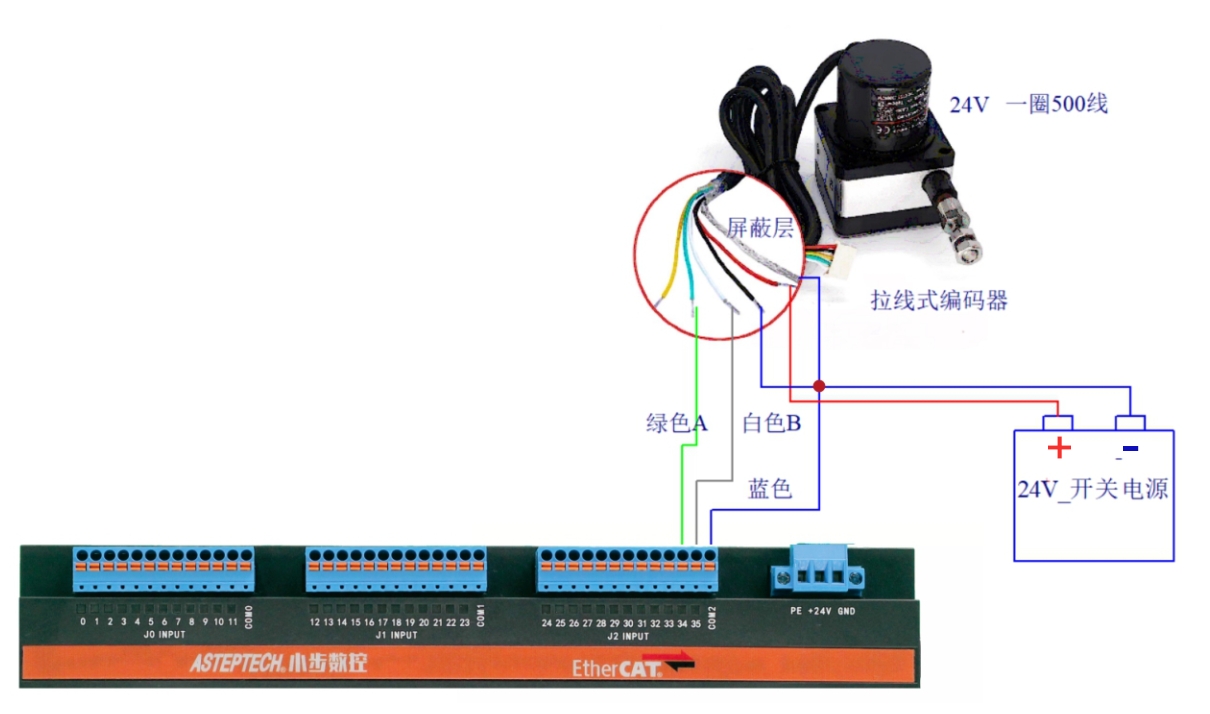
9.外接编码器
端口定义:
| 线号 | 线色 | 定义 | 备注 |
|---|---|---|---|
| +24 | 红 | 电源正(24V) | +24V |
| GND | 黑 | 电源负(GND) | GND |
| 35 | 白 | 编码器B相信号 | B |
| 34 | 绿 | 编码器A相信号 | A |
接线示意图:
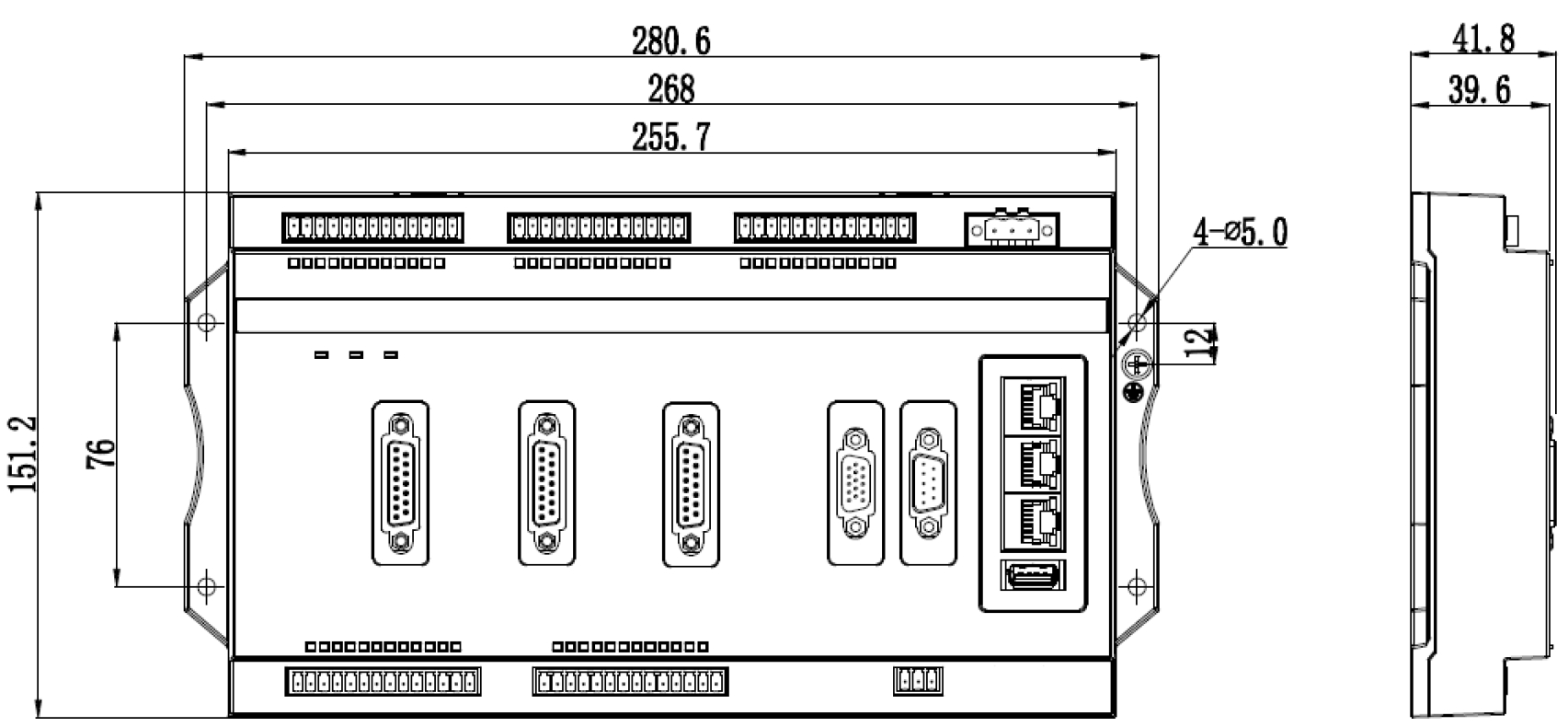
10.安装尺寸
10.1 控制器安装
- 控制卡采用螺丝孔位安装,建议使用M4(直径4毫米)的内六角螺栓固定安装;
- 控制卡安装尺寸,如下图;